


在本课程中,您将学习如何在虚幻引擎5中使用Control Rig,重点放在创建程序化动画系统上。本课程适合完全初学者,一直到专业动画师和经验丰富的游戏开发人员。它从详细的解释和说明开始得非常慢,带领您逐步创建程序化动画系统,这使我们有机会探索和熟悉Control Rig的各种功能。在创建程序化行走系统之后,我们对Control Rig的一些有用功能进行了概括,并尝试了一些允许您与环境互动且运动真实的系统。最后,我们将创建一个程序化原地转向动画系统,包括故障排除、微调,并逐步处理逻辑。项目文件包含了我们为虚幻引擎5.2和5.3创建的所有内容的完成版本。当引擎的5.4版本发布时,这将被更新以包含一个5.4版本。探索的技术和方法适用于单人和多人项目。Control Rig中使用的技术也适用于UEFN。这适用于完全程序化部分和我们在Control Rig内探索的特定功能(在撰写时,animBP访问在 UEFN 中不可用,阻碍了与关键帧动画的组合,但大多数概念仍然有效)。本课程中的信息在其他地方不可获得,这是多年来对Control Rig和程序化动画系统进行试验的结果。我的目标是将我对Control Rig的所有经验压缩成一个易于消化和理解的课程,每一步都有解释和图表,让您可以完全掌握如何为自己的程序化和动态动画使用Control Rig。我期待在课程中见到您,并期待您分享您的创作和想法。我随时为讨论概念/想法/帮助处理任何项目可用,即使您的特定用例未直接在本课程中涵盖。
UE5中的生物角色绑定系统视频教程 由Lincoln Margison创建
MP4 | 视频: h264, 1280×720 | 语言:英语+中英文字幕(云桥网络 机译)| 时长: 80 讲座(7小时15分钟) | 大小: 7 GB 含课程文件

学习打造UE5内的控制架构,以创建程序化动画系统。
学习内容:
学习虚幻引擎5的ControlRig的基础知识
创建程序化行走动画系统
创建程序化原地转向动画系统
学会各种技术,为您的角色动画增加动态运动
掌握ControlRig的功能、变量和逻辑,以及如何将其整合到您的项目中
学习问题解决和调试
学会如何将您的想法从概念变为一个可运行的系统
全面了解ControlRig在单人和多人游戏、视频和动画、UEFN项目等中的应用能力
要求:
不需要虚幻引擎技能或动画技能。本课程将逐步引导您完成每一步,从开始非常缓慢的增加到复杂,直到您完全掌握了用于程序化和动态动画的ControlRig。
目录:
1. Introduction
01. Introduction and overview
02. Basic tips & troubleshooting
2. Creating a Procedural Walk Cycle
01. Initial Character Blueprint setup
02. Initial Animation Blueprint setup
03. Creating the ControlRig class
04. Make ControlRig DO something
05. Create an array of FootNames
06. WorldSpace vs RigSpace explanation
07. Save the default foot transforms to a new array
08. Visualize the foot transforms with DrawTransform
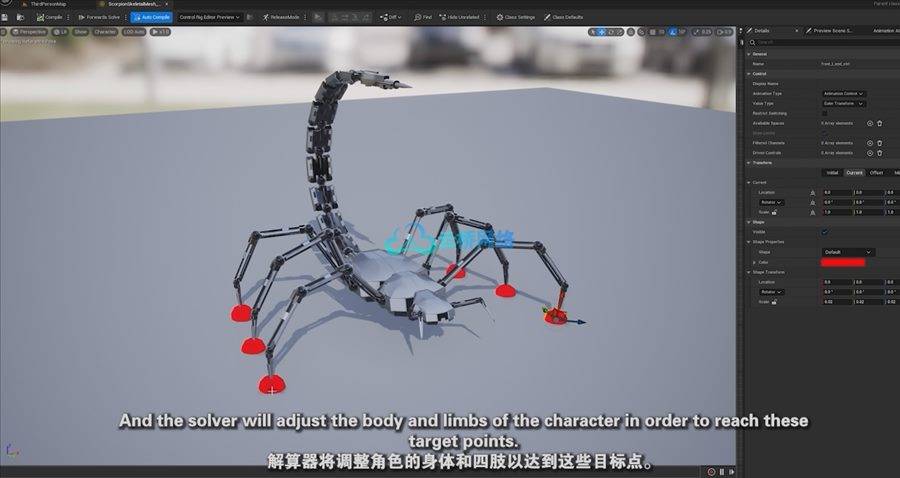
09. FullBodyIK node explanation
10. Add one leg into the solver
11. Add the rest of the legs into the solver
12. SAVE FIRST! Collapse to a function
13. Convert World transform to Rigspace transforms into the solver
14. Explanation of how we will calculate the velocity
15. Create the CalculateVelocity function
16. Calculate how far the character has moved in the world
17. Calculate how far the character moves per second and draw it
18. Smooth the calculated velocity
19. Add comments to the calculate velocity function
20. Cycle explanation
21. Creating the CalculateCycle function
22. Test our cycle with a print node
23. Creating the MoveFeetTransforms function
24. Creating a FootLocked array of booleans
25. Is the foot locked or unlocked logic
26. Create the Swing Percent and unlock condition
27. Unlocked logic and lock condition
28. Include and test the MoveFeetTransforms function
29. Making the unlocked foot snap back to the default pose position
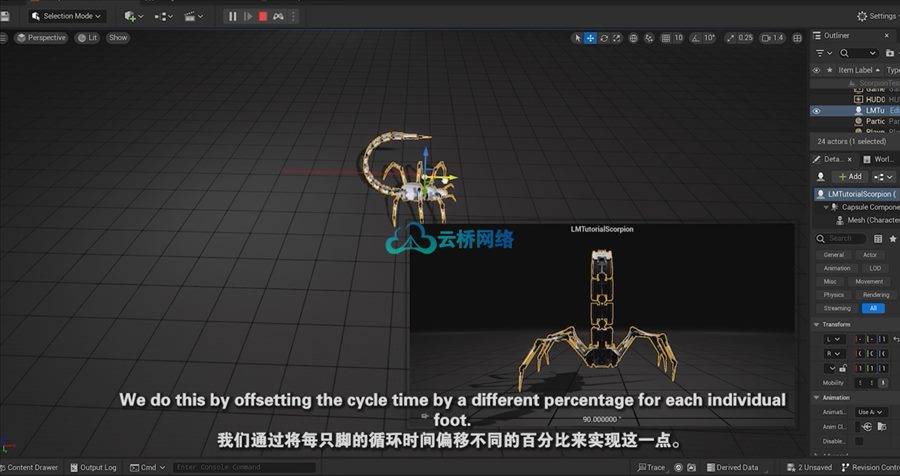
30. Creating the foot timing offset array
31. Creating the PerFootCycle array
32. Using the PerFootCycle instead of Master Cycle
33. A basic interpolation for the swing phase
34. Creating the foot prediction function
35. Projecting the landing spot forward in the direction of velocity
36. Scale the prediction time based on how long until the foot lands
37. Change cycle speed based on the characters movement speed
38. Creating the stride length variable, and calculating the cycle time in seconds
39. Save the foot lift-off spot to a WorldLockedFootTransforms array
40. Accurate interpolation between the lift-off to the landing spot, based on cycle
41. Make the legs lift in an arc using a custom curve
42. Make the lift height based on the movement speed
43. Overview of the plan for foot traces
44. A basic trace for every landing spot
45. Random body motions and general improvements
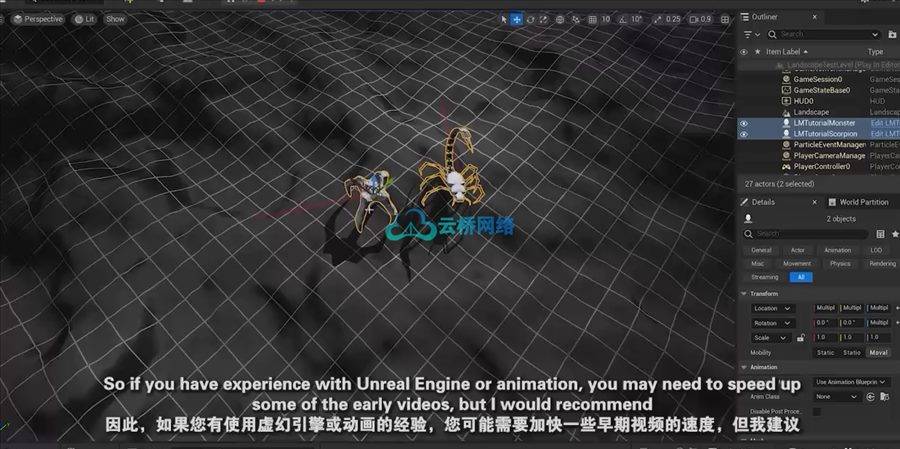
46. More advanced traces explanation and testing on a landscape
47. Implementing more advanced traces
3. Porting control rig to another character
01. Porting the procedural animation system to another character
02. Changing variables for the new character
4. Various ControlRig features and tips for procedural animation
01. Using controls to move the character
02. FullBodyIK settings, and interpolating control targets
03. Value Over Time to delay movements
04. BasicIK node instead of FullBodyIK, when, where, how
05. Finding the Primary and Secondary axis
06. Automatically compute the pole vector
07. Make a bone point in a specific direction
08. Aim more bones at a target with various weighting and interpolation settings
09. Randomize the target point
10. Simulate character breathing with chest scale
11. Combine with an idle animation and create a character class
12. Make the character target a position in the actual game level
13. Creating functions that can be used in any other ControlRig
14. Create the RotateAroundPoint function, to rotate in RigSpace
15. Incorporate the translation change when rotating around a point
16. Create a function to rotate a single bone in place, in RigSpace
5. Turn-in-place animation system
01. The challenge, the goal, and the starting point
02. Saving the accumulated rotation
03. Negate any rotation of the character to keep the same world rotation
04. Make the spine always look in the correct direction
05. Adding the solver and starting a rotation timer
06. Compensate for pieces of the total rotation offset
07. Applying the calculations to see the result on the character
08. Offset the rotation timing of each foot
09. Searching for issues and the next steps to improve
10. Problem solving
11. Weight shift towards the grounded leg
12. Make the movement more natural and bouncy
13. Bug fixing, finalizing, and looking to the future
1、登录后,打赏30元成为VIP会员,全站资源免费获取!
2、资源默认为百度网盘链接,请用浏览器打开输入提取码不要有多余空格,如无法获取 请联系微信 yunqiaonet 补发。
3、分卷压缩包资源 需全部下载后解压第一个压缩包即可,下载过程不要强制中断 建议用winrar解压或360解压缩软件解压!
4、云桥网络平台所发布资源仅供用户自学自用,用户需以学习为目的,按需下载,严禁批量采集搬运共享资源等行为,望知悉!!!
5、云桥网络-CG数字艺术学习与资源分享平台,感谢您的赞赏与支持!平台所收取打赏费用仅作为平台服务器租赁及人员维护资金 费用不为素材本身费用,望理解知悉!

评论(0)